 English
English Español
Español  Português
Português  русский
русский  Français
Français  日本語
日本語  Deutsch
Deutsch  tiếng Việt
tiếng Việt  Italiano
Italiano  Nederlands
Nederlands  ภาษาไทย
ภาษาไทย  Polski
Polski  한국어
한국어  Svenska
Svenska  magyar
magyar  Malay
Malay  বাংলা ভাষার
বাংলা ভাষার  Dansk
Dansk  Suomi
Suomi  हिन्दी
हिन्दी  Pilipino
Pilipino  Türkçe
Türkçe  Gaeilge
Gaeilge  العربية
العربية  Indonesia
Indonesia  Norsk
Norsk  تمل
تمل  český
český  ελληνικά
ελληνικά  український
український  Javanese
Javanese  فارسی
فارسی  தமிழ்
தமிழ்  తెలుగు
తెలుగు  नेपाली
नेपाली  Burmese
Burmese  български
български  ລາວ
ລາວ  Latine
Latine  Қазақша
Қазақша  Euskal
Euskal  Azərbaycan
Azərbaycan  Slovenský jazyk
Slovenský jazyk  Македонски
Македонски  Lietuvos
Lietuvos  Eesti Keel
Eesti Keel  Română
Română  Slovenski
Slovenski  मराठी
मराठी  Srpski језик
Srpski језик

ໂທຫາພວກເຮົາ
+86-15768259626
ສົ່ງອີເມວຫາພວກເຮົາ
coco@zyepower.com

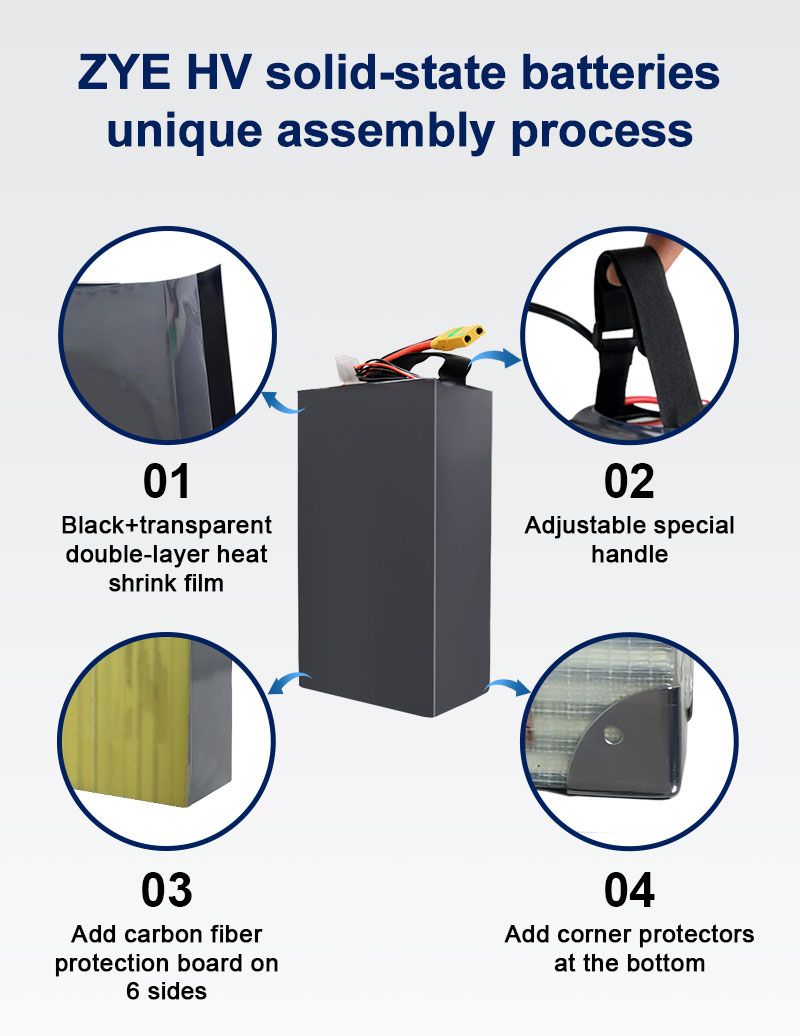
ການອອກແບບ Smart BMS ສໍາລັບ Drone LiPo Packs: Telemetry, ການປົກປ້ອງ, ແລະການປັບປຸງ OTA
A ລະບົບການຄຸ້ມຄອງຫມໍ້ໄຟໃຊ້ເພື່ອຫມາຍເຖິງສິ່ງຫນຶ່ງ: ຮັກສາຈຸລັງຈາກການຈັບໄຟ. ນັ້ນຍັງຢູ່ໃນບັນຊີລາຍຊື່, ແຕ່ສໍາລັບຄໍາຮ້ອງສະຫມັກ UAV ອຸດສາຫະກໍາ, ວົງຈອນປ້ອງກັນພື້ນຖານແມ່ນບໍ່ພຽງພໍອີກຕໍ່ໄປ.
ການປະຕິບັດງານຂອງ drone ທີ່ທັນສະໄຫມຕ້ອງການຮາດແວທີ່ສະຫລາດກວ່າ. ຜູ້ຈັດການເຮືອຕ້ອງການຂໍ້ມູນແບັດເຕີລີສົດໃນກາງຖ້ຽວບິນ. ວິສະວະກອນຕ້ອງການເຫດຜົນດ້ານການປົກປ້ອງທີ່ຕອບສະຫນອງກັບສະພາບຕົວຈິງ, ບໍ່ພຽງແຕ່ຂອບເຂດຄົງທີ່ເທົ່ານັ້ນ. ແລະເມື່ອເຟີມແວ BMS ເຕີບໃຫຍ່ຂຶ້ນ, ຄວາມສາມາດໃນການຊຸກຍູ້ການອັບເດດໃຫ້ກັບແພັກເກັດທີ່ໃຊ້ໄດ້ໂດຍບໍ່ຕ້ອງດຶງພວກມັນອອກຈາກການບໍລິການໄດ້ກາຍເປັນປະໂຫຍດທີ່ແທ້ຈິງ.
ນີ້ແມ່ນລາຍລະອຽດການເຮັດວຽກຂອງສິ່ງທີ່ເຂົ້າໄປໃນການອອກແບບ BMS ອັດສະລິຍະສໍາລັບຊອງ LiPo drone — ແລະເປັນຫຍັງແຕ່ລະຊັ້ນຈຶ່ງສໍາຄັນ.
Telemetry: ເຮັດໃຫ້ຫມໍ້ໄຟເວົ້າ
ວຽກທໍາອິດຂອງ BMS ທີ່ສະຫຼາດແມ່ນການເກັບຂໍ້ມູນ. ການຕິດຕາມລະດັບແຮງດັນຂອງເຊນແມ່ນພື້ນຖານ - ທ່ານຕ້ອງການການອ່ານແຕ່ລະຫ້ອງ, ບໍ່ພຽງແຕ່ແຮງດັນຂອງຊອງ. ຊອງ LiPo ຫົກເຊນສາມາດສະແດງແຮງດັນລວມທີ່ມີສຸຂະພາບດີໃນຂະນະທີ່ເຊື່ອງເຊນທີ່ອ່ອນແອຫນຶ່ງທີ່ຈະ buckle ພາຍໃຕ້ການໂຫຼດ.
ນອກເຫນືອຈາກແຮງດັນ, BMS ທີ່ຖືກອອກແບບດີຄວນລາຍງານ:
ສະຖານະຂອງຄ່າບໍລິການ (SoC) — ຄິດໄລ່ຈາກການນັບ coulomb ບວກກັບເສັ້ນໂຄ້ງແຮງດັນ, ບໍ່ແມ່ນແຮງດັນຢ່າງດຽວ
ສະພາບສຸຂະພາບ (SoH) — ໄດ້ມາຈາກຄວາມສາມາດໃນການຕິດຕາມການຈາງລົງໃນທົ່ວຮອບວຽນ
ອຸນຫະພູມ — ໂດຍສະເພາະແມ່ນຈາກຈຸດເຊັນເຊີຫຼາຍທົ່ວຊອງ, ບໍ່ພຽງແຕ່ທີ່ຢູ່ອາໄສ
ການແຕ້ມປະຈຸບັນ — ເວລາຈິງ ແລະບັນທຶກ, ເປັນປະໂຫຍດສໍາລັບການວິນິດໄສບັນຫາ airframe ຫຼື payload
ການນັບຮອບວຽນ — ຕໍ່ຊຸດ, ບັນທຶກອັດຕະໂນມັດ
ຂໍ້ມູນນີ້ຖ່າຍທອດໄປຫາຕົວຄວບຄຸມການບິນຜ່ານ CAN bus ຫຼື UART, ແລະລົງພື້ນໃນຊອບແວສະຖານີພື້ນດິນ. ສໍາລັບການດໍາເນີນງານຂອງເຮືອ, ມັນເຂົ້າໄປໃນ dashboards ສຸຂະພາບຫມໍ້ໄຟທີ່ບັນຈຸທຸງໃກ້ກັບການບໍລິການສິ້ນສຸດກ່ອນທີ່ມັນຈະເປັນເຫດການພາກສະຫນາມ.
ຊັ້ນ telemetry ແມ່ນສິ່ງທີ່ປ່ຽນຫມໍ້ໄຟ LiPo ຈາກແຫຼ່ງພະລັງງານເຂົ້າໄປໃນຊັບສິນທີ່ມີປະຫວັດການບໍລິການທີ່ເປັນເອກະສານ.
ການປົກປ້ອງ: ບ່ອນທີ່ Logic ດໍາລົງຊີວິດ
ການອອກແບບການປົກປ້ອງໃນ drone BMS ຕ້ອງໄດ້ດຸ່ນດ່ຽງຄວາມປອດໄພກັບການປະຕິບັດການປະຕິບັດ. ການປົກປ້ອງເຮືອບິນພື້ນດິນທີ່ຮຸກຮານເກີນໄປໂດຍບໍ່ຈໍາເປັນ. ການປົກປ້ອງທີ່ອະນຸຍາດໃຫ້ເກີນໄປເຮັດໃຫ້ຮາດແວຫຼຸດລົງຫຼືລົ້ມເຫລວ.
ການປົກປ້ອງຫຼັກໃນການອອກແບບ UAV BMS ທີ່ຮ້າຍແຮງ:
Overvoltage / Undervoltage — ການຕັດໃນລະດັບຂອງຈຸລັງ, ບໍ່ແມ່ນລະດັບຊອງ. ກະຕຸ້ນເມື່ອແຕ່ລະເຊລໄປແຕະເພດານ ຫຼືຊັ້ນທີ່ກຳນົດໄວ້. ເຫຼົ່ານີ້ແມ່ນບໍ່ສາມາດເຈລະຈາໄດ້.
Overcurrent — ທັງສອງຕໍ່ເນື່ອງແລະຈຸດສູງສຸດໃກ້ຈະເຂົ້າສູ່ລະດັບ. ເຮືອບິນ drones ອຸດສາຫະກໍາດຶງກະແສໄຟຟ້າໃນໄລຍະການຍົກນ້ໍາຫນັກຫນັກຕ້ອງການ headroom; BMS ຕ້ອງການຈໍາແນກພະລັງງານທີ່ຖືກຕ້ອງຕາມກົດຫມາຍຈາກສະພາບຄວາມຜິດ.
ການປ້ອງກັນຄວາມຮ້ອນ — ການສາກໄຟໂດຍອີງໃສ່ອຸນຫະພູມແລະ derating derating ການປ່ອຍປະກາດ. ເມື່ອອຸນຫະພູມຂອງເຊນສູງເກີນຂອບເຂດທີ່ກຳນົດໄວ້, BMS ຈະຫຼຸດກະແສໄຟຟ້າທີ່ມີຢູ່ກ່ອນທີ່ຈະເຖິງການຕັດອອກຍາກ. ອັນນີ້ມີປະໂຫຍດຫຼາຍກວ່າການປິດຊື່ - ມັນເຮັດໃຫ້ເຮືອບິນລົງຈອດໄດ້ ແທນທີ່ຈະຕັດພະລັງງານຢ່າງກະທັນຫັນ.
ການດຸ່ນດ່ຽງມືຖື — Passive ຫຼື active, ແລ່ນໃນລະຫວ່າງການສາກໄຟ. ຈຸລັງທີ່ບໍ່ສົມດຸນແມ່ນຫນຶ່ງໃນສາເຫດຕົ້ນຕໍຂອງການທໍາລາຍ LiPo ກ່ອນໄວອັນຄວນ. BMS ທີ່ບໍ່ດຸ່ນດ່ຽງແມ່ນເຮັດໃຫ້ຊີວິດວົງຈອນຢູ່ໃນຕາຕະລາງ.
ການກວດຫາວົງຈອນສັ້ນ — ປະຕິບັດໄດ້ໄວ, ມີເຫດຜົນການຟື້ນຕົວເພື່ອຈໍາແນກການສັ້ນທີ່ແທ້ຈິງຈາກຄວາມຜິດຊົ່ວຄາວ.
ແຕ່ລະການປົກປ້ອງເຫຼົ່ານີ້ຕ້ອງການການປັບລະດັບ, ບໍ່ແມ່ນຄ່າເລີ່ມຕົ້ນທີ່ສຳເນົາມາຈາກການອອກແບບອ້າງອີງ. ຂໍ້ມູນການເຮັດວຽກຂອງ drone ອຸດສາຫະກໍາ - ນ້ໍາຫນັກ payload, ລະດັບຄວາມສູງການບິນ, ລະດັບອຸນຫະພູມອາກາດລ້ອມຮອບ - ຄວນຂັບລົດການປັບທຽບ.

ການອັບເດດ OTA: ເຟີມແວໂດຍບໍ່ມີການຢຸດເວລາ
ນີ້ແມ່ນບ່ອນທີ່ການອອກແບບ BMS smart ແຍກອອກຈາກຮາດແວເກົ່າ. ການອັບເດດເຟີມແວຜ່ານທາງອາກາດອະນຸຍາດໃຫ້ມີຂອບເຂດການປົກປ້ອງ, ຂັ້ນຕອນການດຸ່ນດ່ຽງ, ແລະຕົວກໍານົດການ telemetry ໄດ້ຮັບການປັບປຸງໂດຍບໍ່ມີການດຶງອອກຈາກການບໍລິການ.
ສໍາລັບເຮືອໃຫຍ່, ນີ້ແມ່ນສໍາຄັນ. ການອັບເດດເຟີມແວ BMS ໃນຫ້າສິບແພັກດ້ວຍຕົນເອງຕ້ອງໃຊ້ເວລາ ແລະແນະນຳການຈັດການຄວາມສ່ຽງ. OTA ຍູ້ການອັບເດດຜ່ານການເຊື່ອມຕໍ່ຂໍ້ມູນຂອງ drone ຫຼືການເຊື່ອມຕໍ່ສະຖານີພື້ນດິນໃນລະຫວ່າງການສາກໄຟປົກກະຕິ.
ຄວາມປອດໄພແມ່ນສໍາຄັນຢູ່ທີ່ນີ້. ທໍ່ການອັບເດດ OTA ຕ້ອງການແພັກເກັດເຟີມແວທີ່ລົງນາມ ແລະການກວດສອບເວີຊັນເພື່ອປ້ອງກັນການດັດແກ້ທີ່ບໍ່ໄດ້ຮັບອະນຸຍາດ — ໂດຍສະເພາະທີ່ກ່ຽວຂ້ອງສໍາລັບການດໍາເນີນງານ UAV ການຄ້າ ຫຼືທີ່ມີການຄວບຄຸມ.
ວິທີການ ZYEBATTERY ເຂົ້າຫາການອອກແບບ BMS
ZYEBatteryສ້າງແບດເຕີຣີ lithium-ion UAV ທີ່ມີປະສິດຕິພາບສູງ ແລະແບັດເຕີຣີ lithium-ion UAV ທີ່ມີປະສິດຕິພາບສູງດ້ວຍຮາດແວ BMS ອັດສະລິຍະທີ່ປະສົມປະສານທີ່ອອກແບບມາສະເພາະສຳລັບການນຳໃຊ້ drone ອຸດສາຫະກຳ. ນັ້ນຫມາຍຄວາມວ່າ telemetry ລະດັບເຊນ, calibrated ການປົກປ້ອງຫຼາຍຊັ້ນ, ແລະສະຖາປັດຕະ BMS ສ້າງຂຶ້ນເພື່ອສະຫນັບສະຫນູນການອັບເດດເຟີມແວຍ້ອນວ່າຄວາມຕ້ອງການການດໍາເນີນງານພັດທະນາ.
ເປົ້າຫມາຍບໍ່ພຽງແຕ່ເປັນຫມໍ້ໄຟທີ່ເຮັດວຽກ. ມັນເປັນຫມໍ້ໄຟທີ່ຕິດຕໍ່ສື່ສານ, ປົກປ້ອງອັດສະລິຍະ, ແລະປະຈຸບັນຕະຫຼອດຊີວິດການບໍລິການຢ່າງເຕັມທີ່.
ສົ່ງສອບຖາມ


X
ພວກເຮົາໃຊ້ cookies ເພື່ອສະເຫນີໃຫ້ທ່ານມີປະສົບການການຊອກຫາທີ່ດີກວ່າ, ວິເຄາະການເຂົ້າຊົມເວັບໄຊທ໌ແລະປັບແຕ່ງເນື້ອຫາ. ໂດຍການນໍາໃຊ້ເວັບໄຊທ໌ນີ້, ທ່ານຕົກລົງເຫັນດີກັບການນໍາໃຊ້ cookies ຂອງພວກເຮົາ.
ນະໂຍບາຍຄວາມເປັນສ່ວນຕົວ
ຂ່າວ
 ວິທີການສ້າງຊອງແບັດເຕີຣີ Lipo drone?2025/08/28
ວິທີການສ້າງຊອງແບັດເຕີຣີ Lipo drone?2025/08/28